
3D-kuvaus ja -teknologiat
3D-kuvauksessa kuvassa on mukana syvyystieto vrt. 2D ja 3D. Tämä syvyystieto mahdollistaa uusia tapoja analysoida kuvaa ja mitata asioita kuvasta. Syvyystiedon avulla pystytään esimerkiksi laskemaan kappaleiden tilavuuksia ja analysoimaan kappaleen piirteitä kolmiulotteisesti. 3D-kuva mahdollistaa myös esimerkiksi kappaleiden asennon analysoinnin poimintaa varten tai törmäysten välttämiseksi.
3D-kuvaus robotiikassa
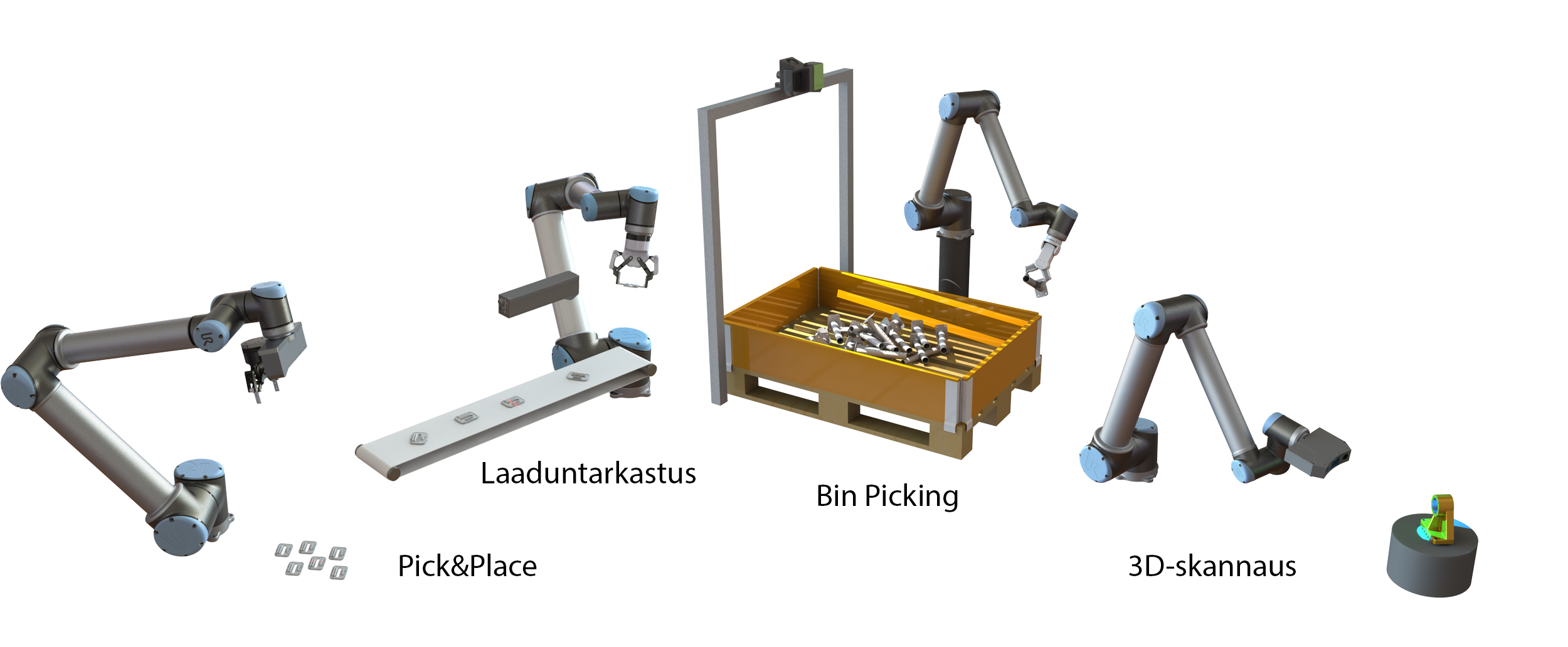
Robotiikassa 3D-kuvausta hyödynnetään ainakin 3D-skannauksessa, Pick & Place- ja Bin Picking -sovelluksissa sekä turvakameroissa/-skannereissa. 3D-skannauksessa kappaleesta/kohteesta pyritään luomaan digitaalinen 3D-malli esimerkiksi mallin muokkaamista varten tai kohteen digitalisoimiseksi. 3D-skannaamisessa robotin tehtävänä on yleensä joko liikuttaa ja käännellä kuvattavaa kohdetta eri asentoihin tai liikuttaa 3D-skannaamiseen käytettävää kameraa kohteen ympärillä.
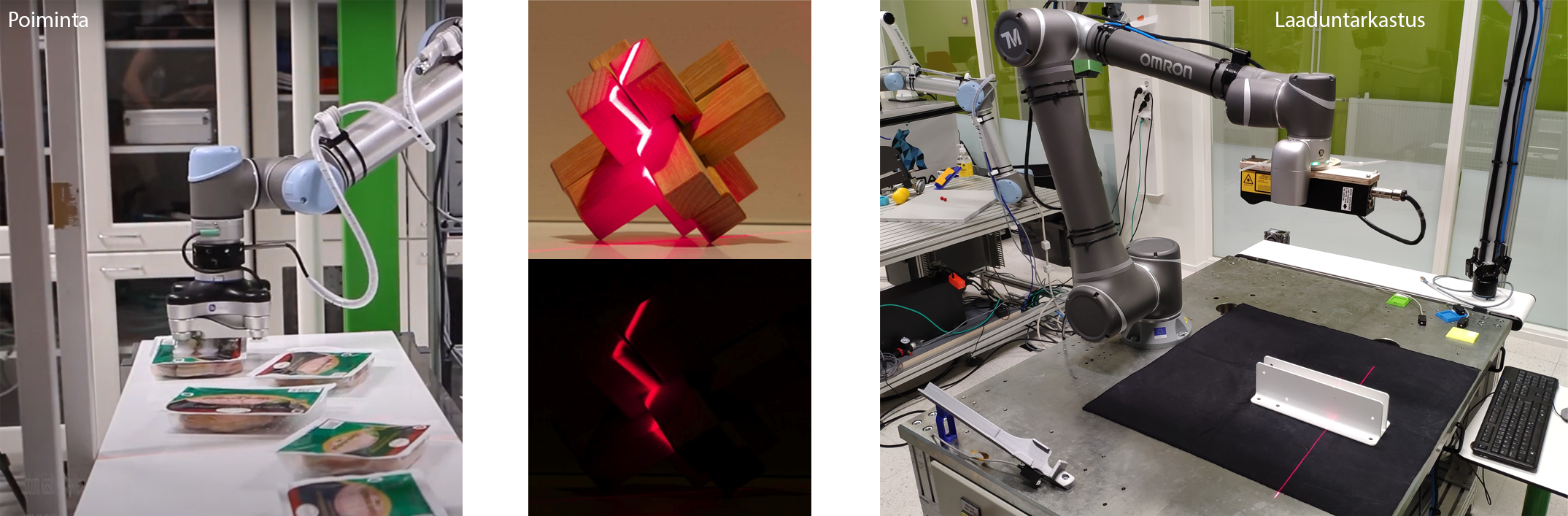
Pick & Place -sovelluksissa 3D-kuvausta voidaan hyödyntää esimerkiksi eri korkuisten kappaleiden poiminnassa kuljettimelta tai jos kappale voi tulla poimittavaksi eri asennoissa. 3D-kuvan tietoa voidaan hyödyntää myös esimerkiksi kappaleita laatikoitaessa ns. älykkäästi eli laskemalla, miten kyseisiä kappaleita saadaan mahtumaan laatikkoon mahdollisimman monta. 3D-kuvausjärjestelmä voi olla asennettuna esimerkiksi kuljettimen yläpuolelle tai integroituna kiinteästi robottiin.
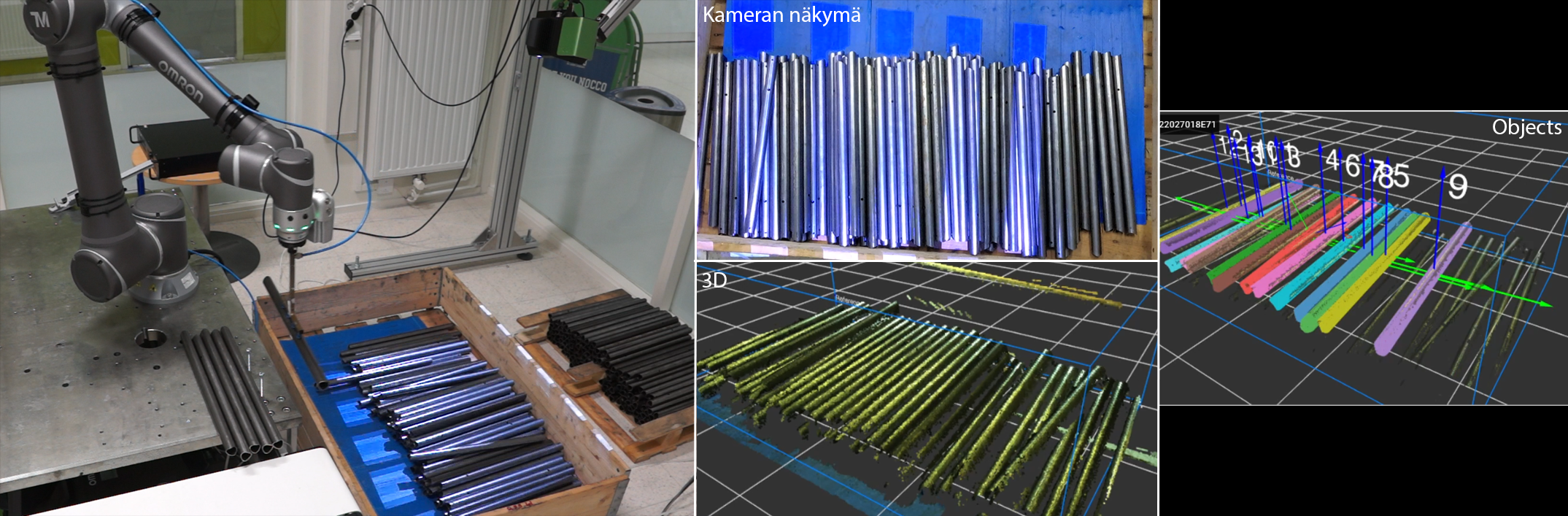
Bin Picking -sovelluksissa kappaleita poimitaan yleensä laatikosta/lavakaulukselliselta kuormalavalta. Yleensä tarkoituksena on, että kappaleet voivat olla täysin sekaisin laatikossa ja niitä ei ole tarvinnut erikseen järjestellä. Tällöin 3D-kuvan avulla voidaan tunnistaa poimittavaksi kelpaavat kappaleet ja niiden asennot. Kamera voi sijaita kiinteästi asennettuna kuvauspaikalle tai kamera voi olla kiinnitettynä robotissa, jolloin on mahdollista esimerkiksi kuvata useita eri laatikoita kappaleiden poimintaa varten.
Yleisesti käytettäviä 3D-kuvausteknologioita
Stereokuvaus
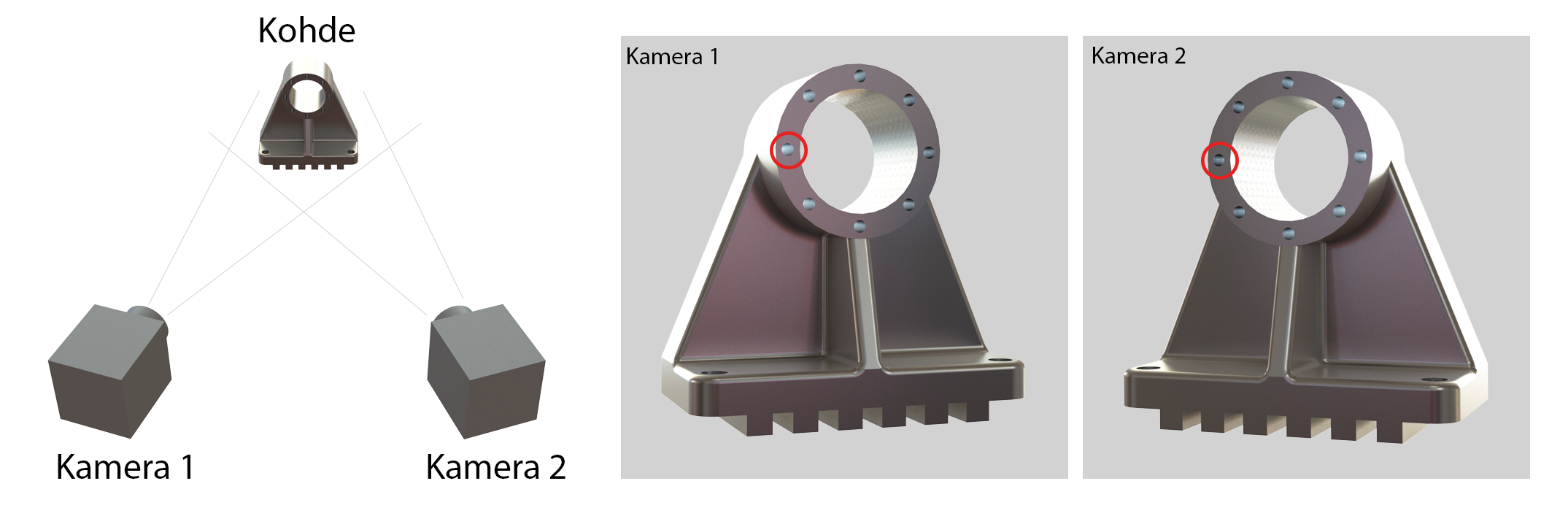
Stereokuvauksessa kohteesta/kappaleesta otetaan kuvia vähintään kahdesta eri suunnasta kappaleen liikkumatta. Eri suunnista otetut kuvat kertovat kolmiulotteisen muodon, jos vastinpisteet osataan kohdistaa oikein. Stereokuvauksessa kuvat voidaan ottaa yhden kameran paikkaa liikuttamalla (hitaampaa) tai käyttämällä useampaa kameraa samaan aikaan (nopeampaa). Stereokuva soveltuu esimerkiksi kappaleen poimintakorkeuden ja asennon selvittämiseen tai useita kuvia otettaessa 3D-mallin luomiseen kohteesta (fotogrammetria).
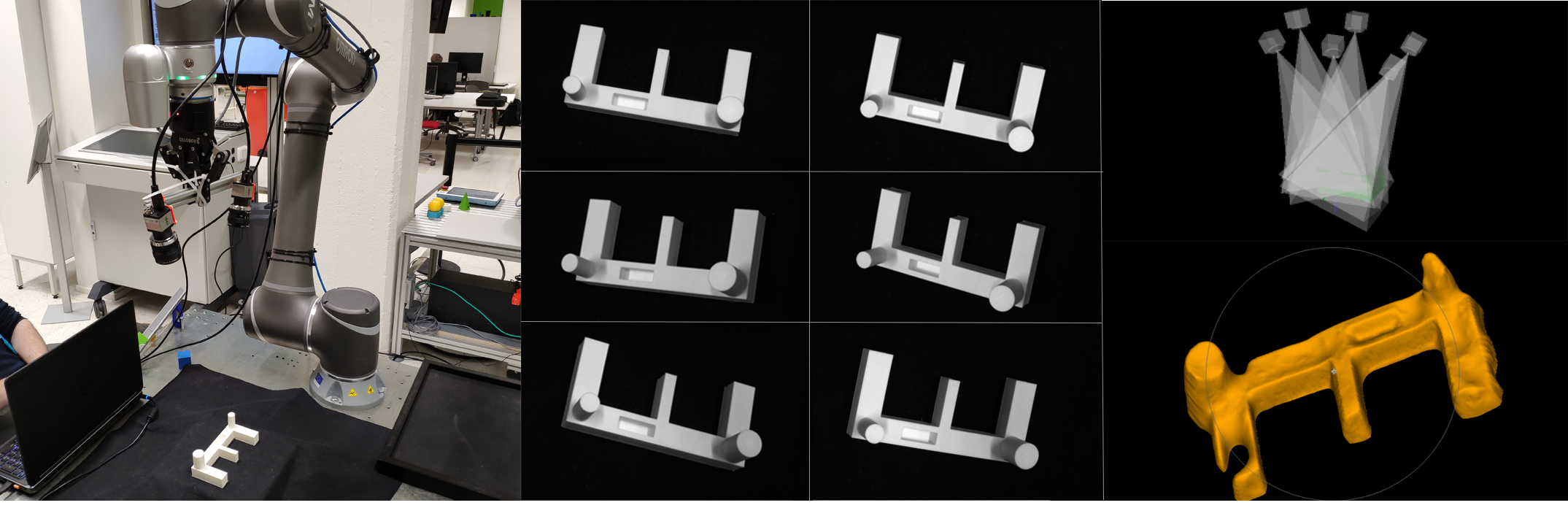
Rakenteelliseen valaisuun perustuva 3D-kuvaus
Rakenteelliseen valaisuun perustuvassa 3D-kuvauksessa kohdetta osittain valaisemalla saadaan selville sen paikka. Valaisukeinona käytetään yleensä laseria (laserviiva) tai projektiota. 3D-kuva muodostetaan tarkkailemalla laserviivan tai projektion muodonmuutosta kohteessa. Rakenteelliseen valaisuun perustuva 3D-kuvaus soveltuu hyvin esimerkiksi erilaisiin Pick & Place- ja Bin Picking -sovelluksiin sekä 3D-mallien luontiin. Poimintasovelluksissa yleensä yhdellä kuvauskerralla saadaan tietoon yksi tai useampi poimittava kappale. 3D-malleja luodessa kuvauskertoja tarvitaan useampia eri suunnista.
Laserviivaan perustuva 3D-kuvaus
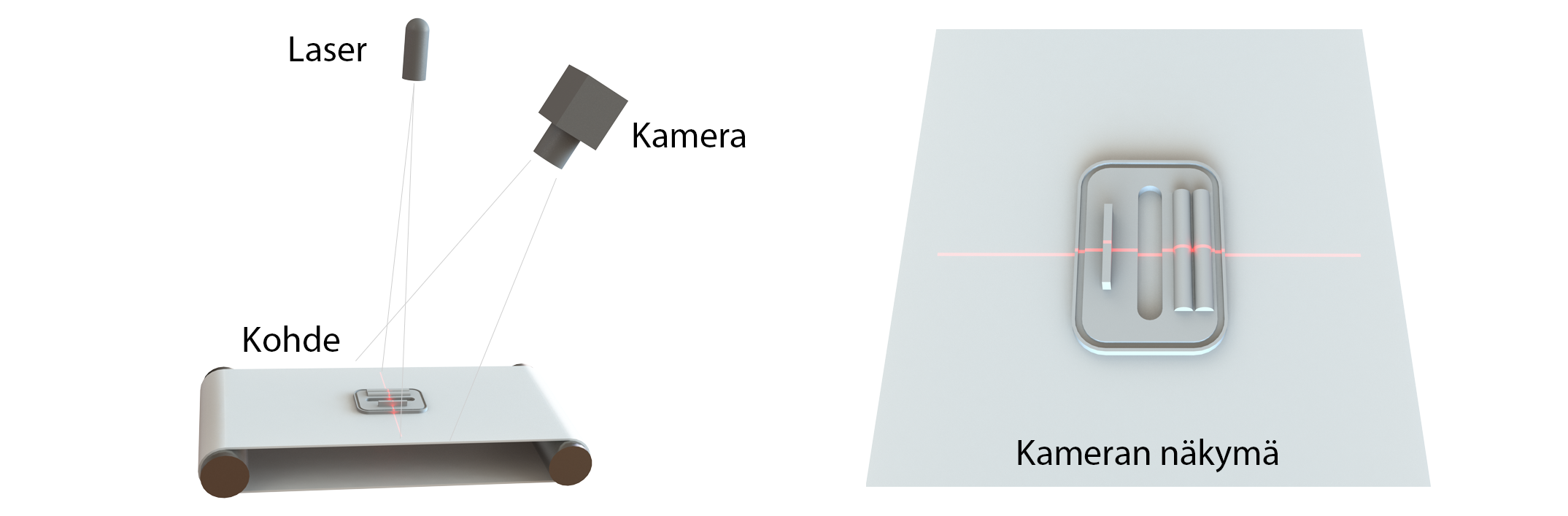
Perinteisin rakenteelliseen valaisuus perustuva 3D-kuvaustekniikka hyödyntää laserviivaa. Laserviiva projisoidaan kohteen pinnalle ja kamera kuvaa laseviivan muodon muutokset kohteessa. Jotta koko kohde saadaan kuvattua, pitää kohteen tai laserviivan liikkua. Yleensä tämä toteutetaan niin, että kohde kulkee kuljettimella.
Valaisukuvioon perustuva 3D-kuvaus
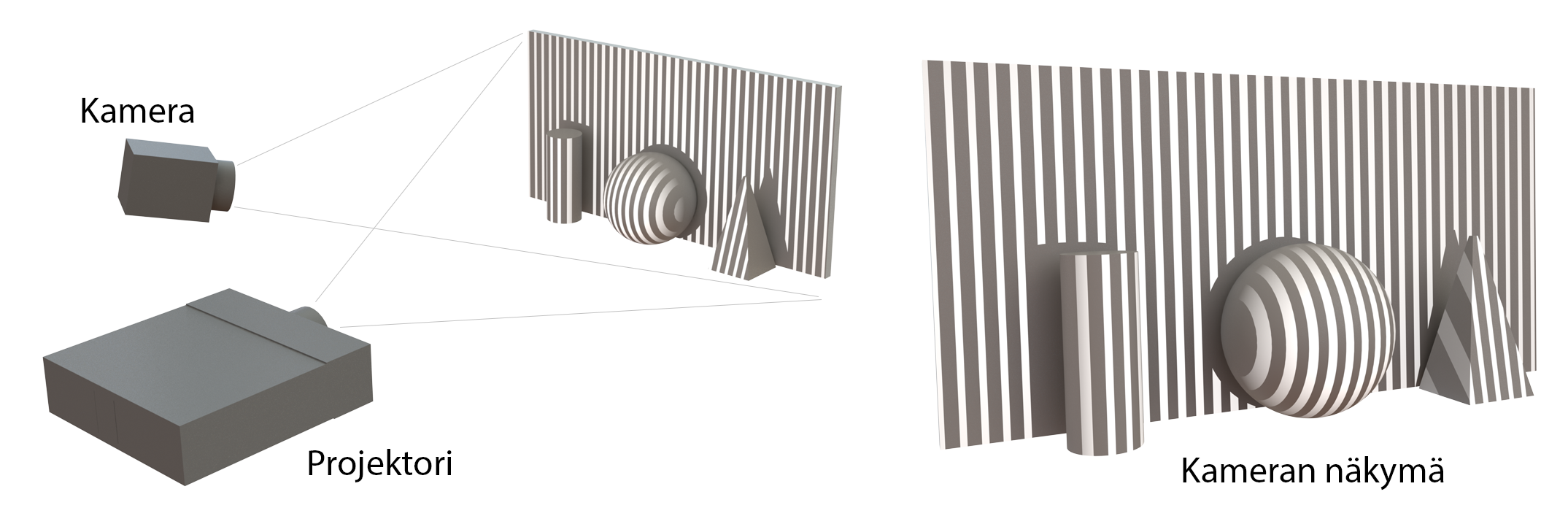
Valaisukuvioon perustuvassa 3D-kuvauksessa tietokoneella tuotetaan erilaisia valaisukuvioita, joita projisoidaan peräkkäin kohteen pinnalle. Kamera kuvaa jokaisen valaisukuvion muodonmuutokset kohteessa ja niistä luodaan 3D-kuva. Valaisukuvioon perustuvassa 3D-kuvauksessa kuva-ala voi olla hyvinkin iso ja kohde voi pysyä kuvatessa paikallaan.
Time of Flight
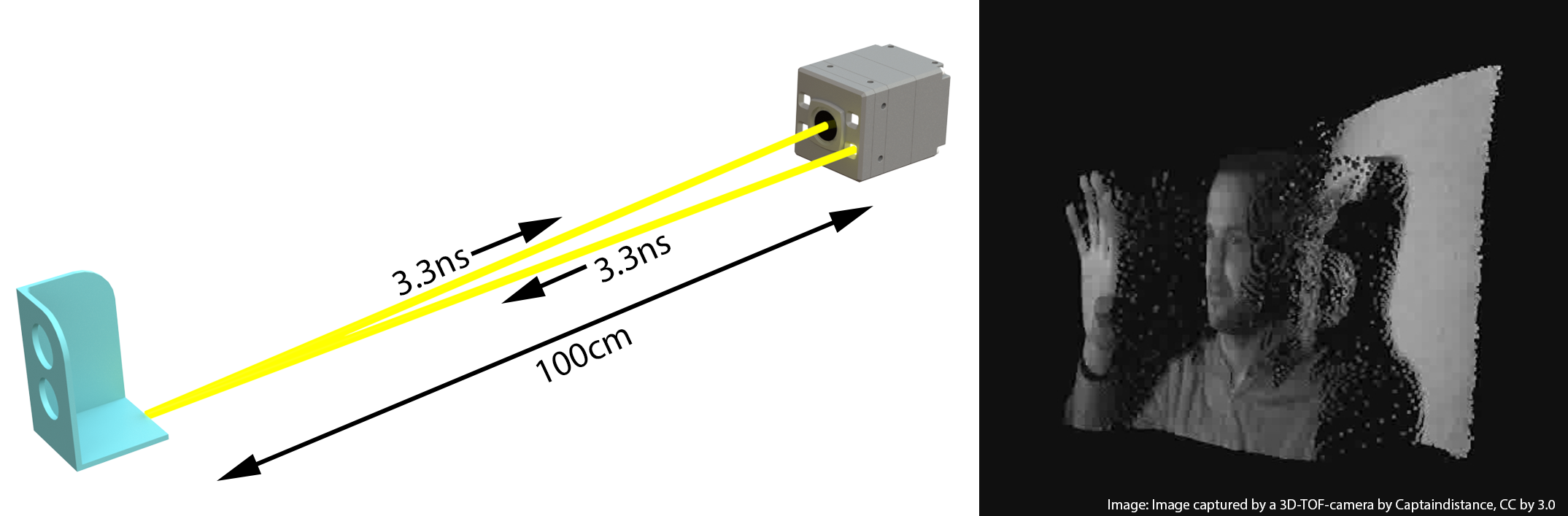
Time of Flightissa on sama toimintaperiaate kuin ultraääniantureissa, mutta tässä tapauksessa lasketaan aikaa, joka valonsäteiltä kestää palata takaisin kohteelta kameralle, kun taas ultraääniantureissa lasketaan ääniaaltojen kulkemaa aikaa. Tekniikka soveltuu esimerkiksi 3D-mallin luomiseen (vrt. Kinect V2 + 3D builder) tai esineiden paikoitukseen isoilla etäisyyksillä.
Depth from focus
Depth from focus 3D-kuvaustekniikassa kohteiden etäisyyttä kamerasta arvioidaan vertailemalla niiden tekstuurien tarkkuuksia eri tarkennusetäisyyksillä. Tekniikkana depth from focus ei ole kovin tarkka ja vaatii moottoritarkennuksellisen linssin tai kameran liikuttamisen kohdetta kohti tai kohteesta poispäin. Seuraavassa videossa näkyy havaintoesitys Depth from Focus -tekniikan käytöstä. Videolla näkyy, miten eri pultit näkyvät kuvassa tarkkoina, kun optiikan tarkennusetäisyyttä vaihdellaan.